Themes and Activities
Uncrewed Systems
Seafloor mapping data collected by advanced sonar systems are in high demand for various national priorities, like those outlined in the National Ocean Mapping, Exploration, and Characterization (NOMEC) strategy.
As hydrographic surveying technology advances, including the development of new tools which go beyond traditional, ship-based methods, the hydrographic community can benefit from clear, rigorous information about the capabilities and performance of these systems.
COMIT is working to gather and evaluate such data by testing different sensor and uncrewed system (UxS) combinations to improve mapping accuracy and efficiency. While the direct technical improvements to these systems will likely come from specialized manufacturers, COMIT aims to bridge the gap by partnering with different industrial groups to better facilitate the practical implementation of these advancements. This involves coordinated testing using regional testbeds and leveraging the expertise of researchers familiar with the equipment and its operational needs.
Some of the current projects related to this theme are summarized below:

Oceanic glider aboard a marine research vessel

COMIT USV TREVOR – Test Robotics Environment Vehicle for Ocean Research
Testbeds for Multibeam Systems
The West Florida shelf provides a diverse environment for assessing different systems and sensors. COMIT’s field missions in 2020-2022 focused on the very nearshore environments, and as of last year (2023) we have expanded the domain to investigate testbeds further offshore.
In September 2023, we conducted a cruise in the eastern Gulf of Mexico to investigate some operational considerations for establishing a network of test beds. In total, the cruise visited seven stations and accomplished a variety of research activities such as: collecting high-resolution bathymetry for a spar buoy deployment, testing glider-based calibrated echosounder backscatter data, and testing glider-based sound speed profile data.
We have made significant progress selecting a backscatter calibration site which would be a first for the region.
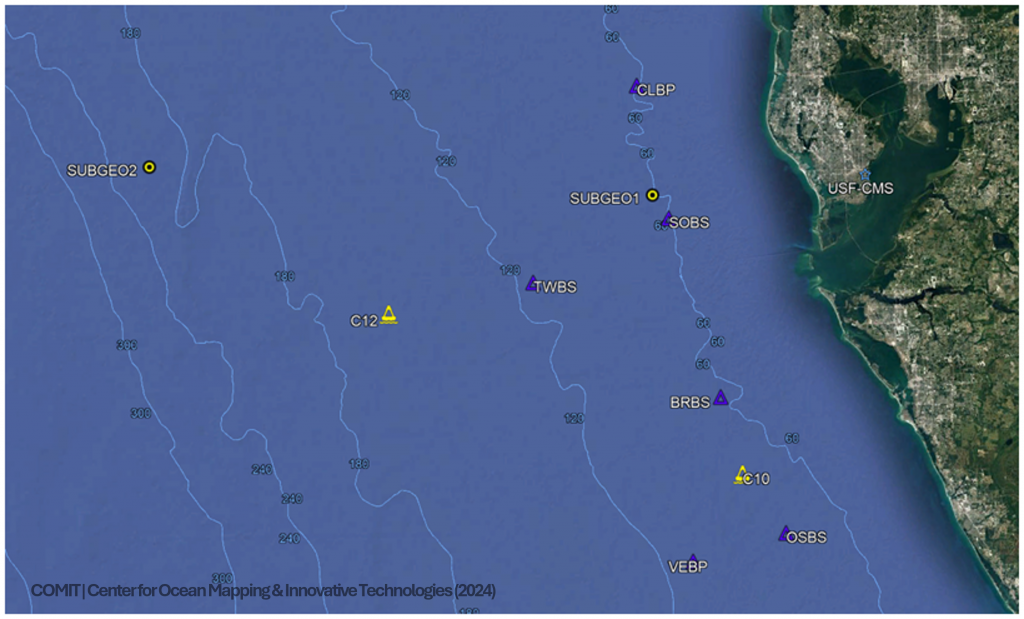
Map of Fall 2023 COMIT Cruise stations
Repurposing Legacy Data
Autonomous underwater gliders employ wings and a tail fin to generate up and down movement through the water column and collect data over days to weeks. These platforms typically carry a CTD, a GPS for positioning during surfacing, a compass for attitude and heading, and an altimeter for bottom detection.
With these sensors, it is possible to obtain geo-located water depth readings of opportunity. The altimeter has benthic applications as it can be paired with glider depth to determine seafloor depth. Though interpolation of one to many collection(s) of mission data points, we can derive coarse bathymetry maps by pairing glider depth and altimeter height above bottom.
Leveraging past data sets from the USF glider fleet, preliminary efforts show that large-scale features (>100m) are well-resolved.
Two areas in the eastern Gulf of Mexico have been selected as test cases for developing a technique for this application to ascertain effectiveness. An example is provided below (Figure) for a ridge feature at the ~65 m isobath on the West Florida Shelf (WFS), west of Tampa Bay, commonly known as “The Elbow”.
Glider derived bathymetry is an opportunistic product and COMIT seeks to innovate and use these data to expand bathymetry collection given USF’s glider fleet is out almost 365 days/year and has had sustained operations for over the last 10 years. Areas with frequent mission flyover may yield high enough data density to resolve additional large-scale features yet to be mapped.
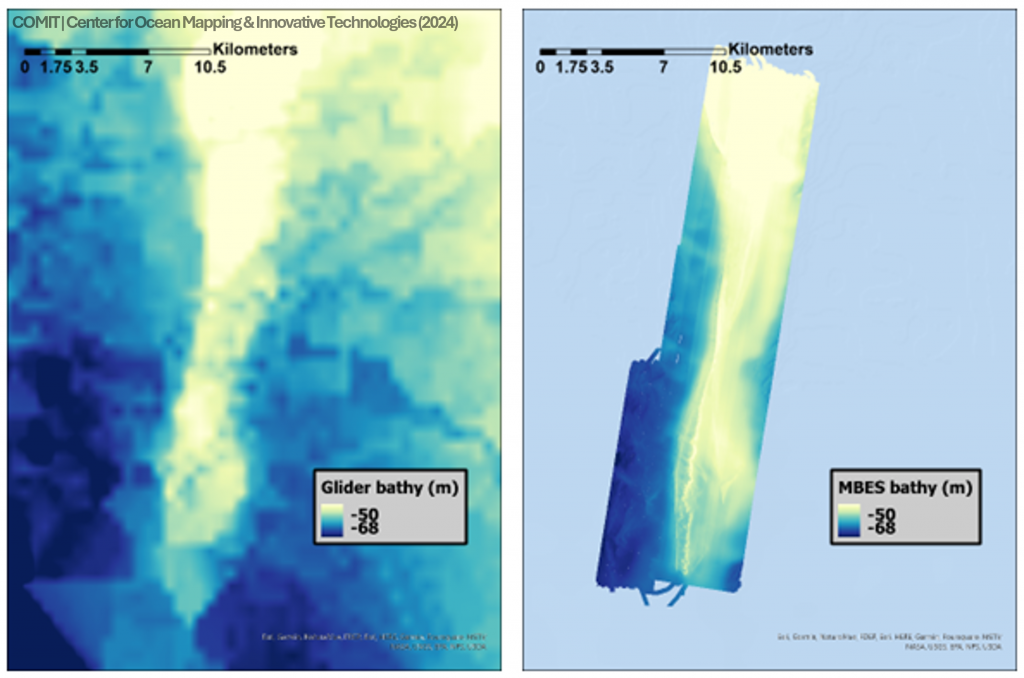
Preliminary map of glider-derived bathymetry for the Elbow on the WFS is shown on the left,
while data collected from a high-resolution shipboard MBES is shown on the right. The glider data has
the advantage of covering much larger areas but relies on interpolation between glider tracks.
Sound Speed Profiles from Oceanic Gliders
Surface vessels, whether crewed or uncrewed, are limited in the amount of sound speed (SSP) information they can collect. Yet these data are fundamental to generating multibeam echo sounder data products that meet increasingly exacting specifications required uses such as: benthic ecology, geohazard studies, and the identification of cultural and economic resources. Insufficient sound speed information can have profound impacts on data quality and usability.
This parameter often varies greatly in 3D space, but this is not yet well-characterized and understood.
Underwater profiling gliders are capable of continuous data acquisition for weeks to months, often in sea states that would restrict or prohibit most other platforms. How these platforms can be leveraged to support uncrewed mapping operations is an active area of research at COMIT.
We are working to evaluate the role of oceanic gliders for SSP measurements in uncrewed surveys by quantifying their limitations and constraints. We’re also exploring the efficiencies and deficiencies in collecting water column data applied towards sonar applications.
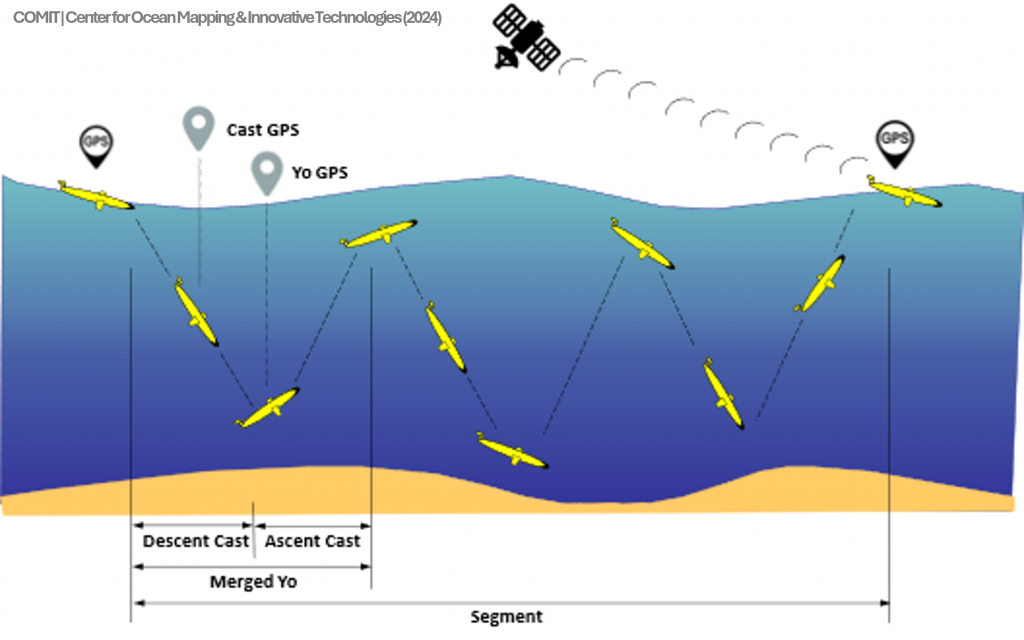
Glider subsurface profiling and position fix details. Estimated position fixes of single casts
(yos) and merged cycles of profiles
Uncrewed System Development
As our other projects and field experiments progress, they have highlighted the utility of uncrewed systems in highly populated, dynamic, coastal waters, as well as the challenges. The latter requires significant investment in software that is suitable to program, control, and monitor autonomous systems in such environments.
This meant that we needed a suitable platform to expand research, development, testing, and evaluation of advanced software for ocean mapping using uncrewed systems.
We elected to modernize a 15yo uncrewed surface vehicle (USV) originally designed and built at USF for visual surveys of seagrass in shallow water. The vehicle retrofit began in February 2023 and the USV reached a deployable state by September 2023. Much of the retrofit was completed by former intern and current staff member, Jaden Crute, a recent B.S. graduate in mechanical engineering.
This platform is known as TREVOR, or the Test-Robotics Environment Vehicle for Ocean Research. Its design centers around four main criteria:
Flexible: able to integrate a variety of payloads, with priority towards hydrographic sensors
Reproducible: construction from parts/components with repeatable dimensional accuracy and precision
Accessible: efficient and cost-effective to produce at moderate volumes with minimal on-site tooling, low barrier to entry for operation
Portable: able to quickly break the USV down by one person for transport in the bed of a pickup truck

Final hull schematic and demonstration of disassembly/assembly ease and portability –
TACOMAX